{kind=link}
{kind=link}
{kind=link}
{kind=link}
An infra-red sensor array for detecting lines and small objects up to 15cm away.
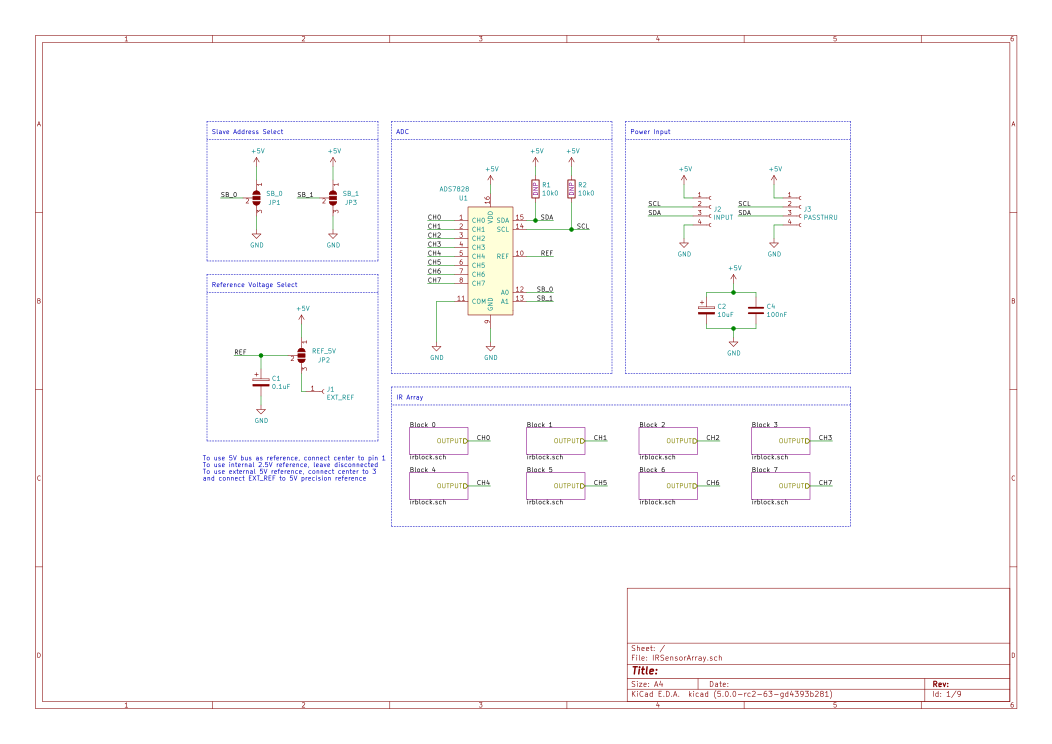
- 3.3V - 6V input voltage
- Can be used with I2C fast mode using ~2k pullups (try 10k first)
- Can detect lines with high precision and speed
- Can detect objects and surfaces up to 15cm away
- Uses 4-pin JST-XH headers for power and data
- Power and data be daisychained
This project was created using KiCad 5 RC2. Use it to open and edit this design.
| "Id" | "Designator" | "Package" | "Quantity" | "Designation" | "Supplier and ref" | ||
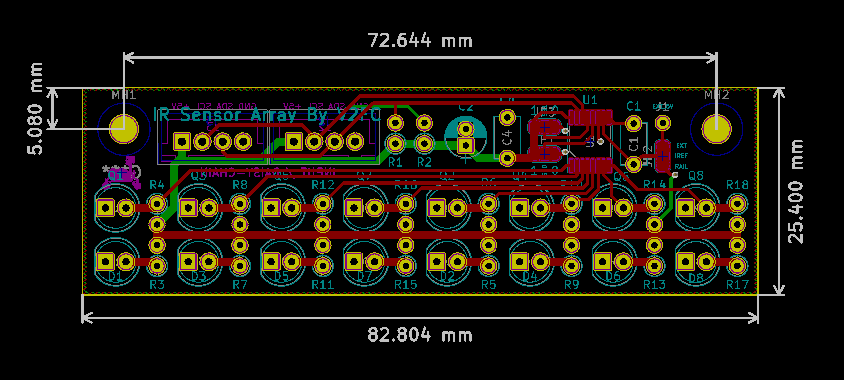
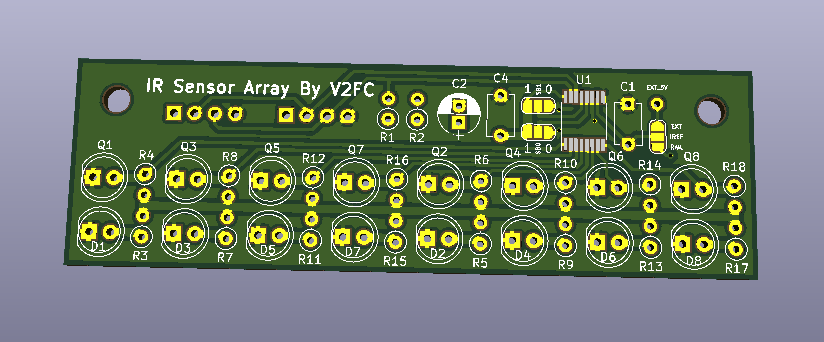
| 1 | "MH2,MH1" | "MountingHole_3.2mm_M3" | 2 | "MountingHole_3.2mm_M3" | |||
| 2 | "C1" | "C_Disc_D5.1mm_W3.2mm_P5.00mm" | 1 | "0.1uF" | |||
| 3 | "C2" | "CP_Radial_D5.0mm_P2.00mm" | 1 | "10uF" | |||
| 4 | "C4" | "C_Disc_D5.1mm_W3.2mm_P5.00mm" | 1 | "100nF" | |||
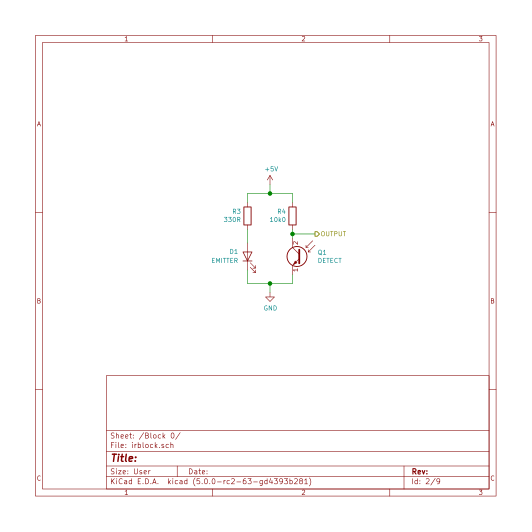
| 5 | "D1,D2,D3,D4,D5,D6,D7,D8" | "LED_D5.0mm" | 8 | "EMITTER" | |||
| 6 | "J1" | "Measurement_Point_Round-TH_Small" | 1 | "EXT_REF" | |||
| 7 | "Q1,Q2,Q3,Q5,Q6,Q7,Q8,Q4" | "LED_D5.0mm" | 8 | "QSD124" | |||
| 8 | "R1,R2,R4,R6,R8,R10,R12,R14,R16,R18" | "R_Axial_DIN0207_L6.3mm_D2.5mm_P2.54mm_Vertical" | 10 | "10k0" | |||
| 9 | "R3,R5,R7,R9,R11,R13,R15,R17" | "R_Axial_DIN0207_L6.3mm_D2.5mm_P2.54mm_Vertical" | 8 | "330R" | |||
| 10 | "U1" | "TSSOP-16_4.4x5mm_Pitch0.65mm" | 1 | "ADS7828" | |||
| 11 | "J2" | "JST_XH_B04B-XH-A_04x2.50mm_Straight" | 1 | "INPUT" | |||
| 12 | "J3" | "JST_XH_B04B-XH-A_04x2.50mm_Straight" | 1 | "PASSTHRU" | |||
| 13 | "JP1" | "SolderJumper-3_P1.3mm_Open_RoundedPad1.0x1.5mm_NumberLabels" | 1 | "SB_0" | |||
| 14 | "JP2" | "SolderJumper-3_P1.3mm_Open_RoundedPad1.0x1.5mm_NumberLabels" | 1 | "REF_5V" | |||
| 15 | "JP3" | "SolderJumper-3_P1.3mm_Open_RoundedPad1.0x1.5mm_NumberLabels" | 1 | "SB_1" | |||
| 16 | "G***" | "rover" | 1 | "LOGO" |
Install the sensor array using two M3 screws and standoffs.
Use the library included with this repo to read the values of the sensors.
Use the following code to create a sensor array object:
SensorArray array1(lookup_table, I2C ID);
See the header file for an example.
This project is licensed under the MIT License - see the LICENSE.md file for details
- Special thanks to the V2FC robot team!