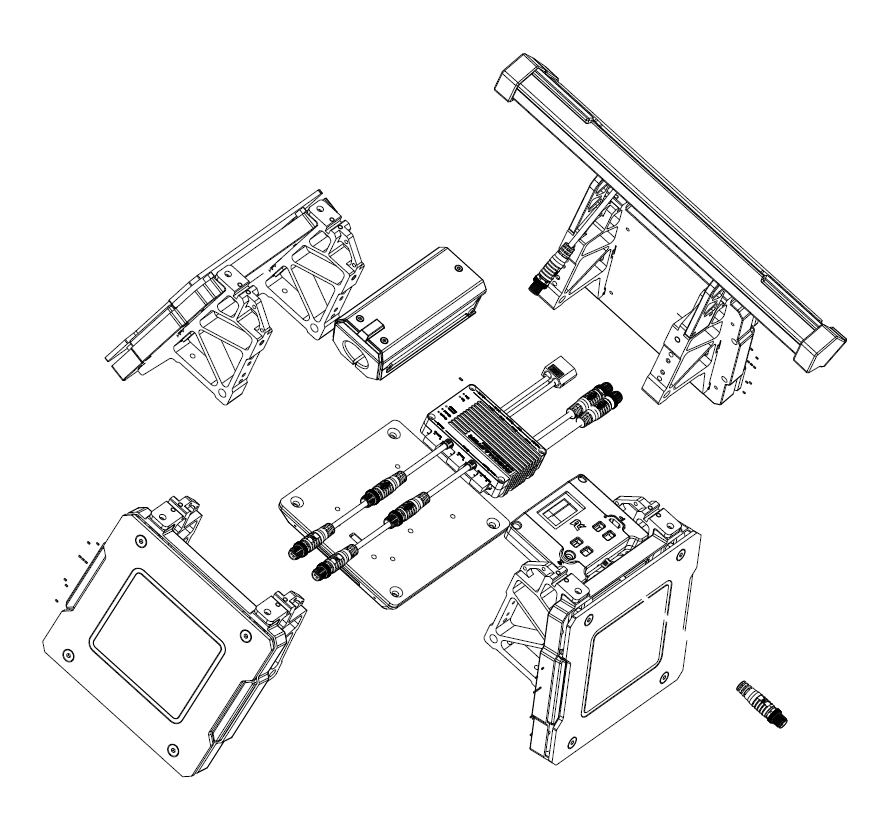
RoboMaster机器人平台基于模块化设计,支持快拆结构,各模块可单独编程与调试使用。
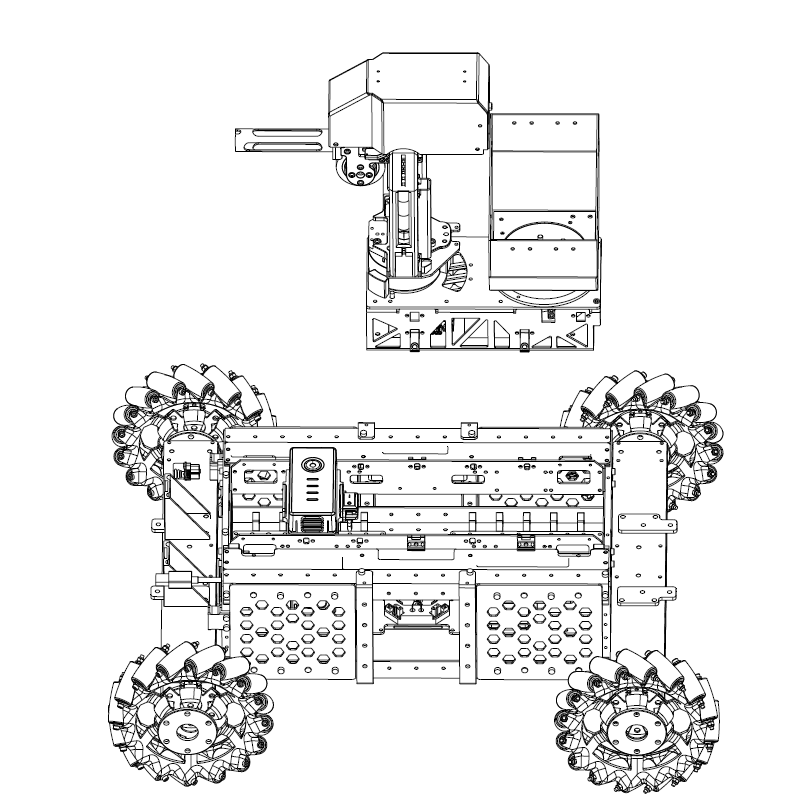
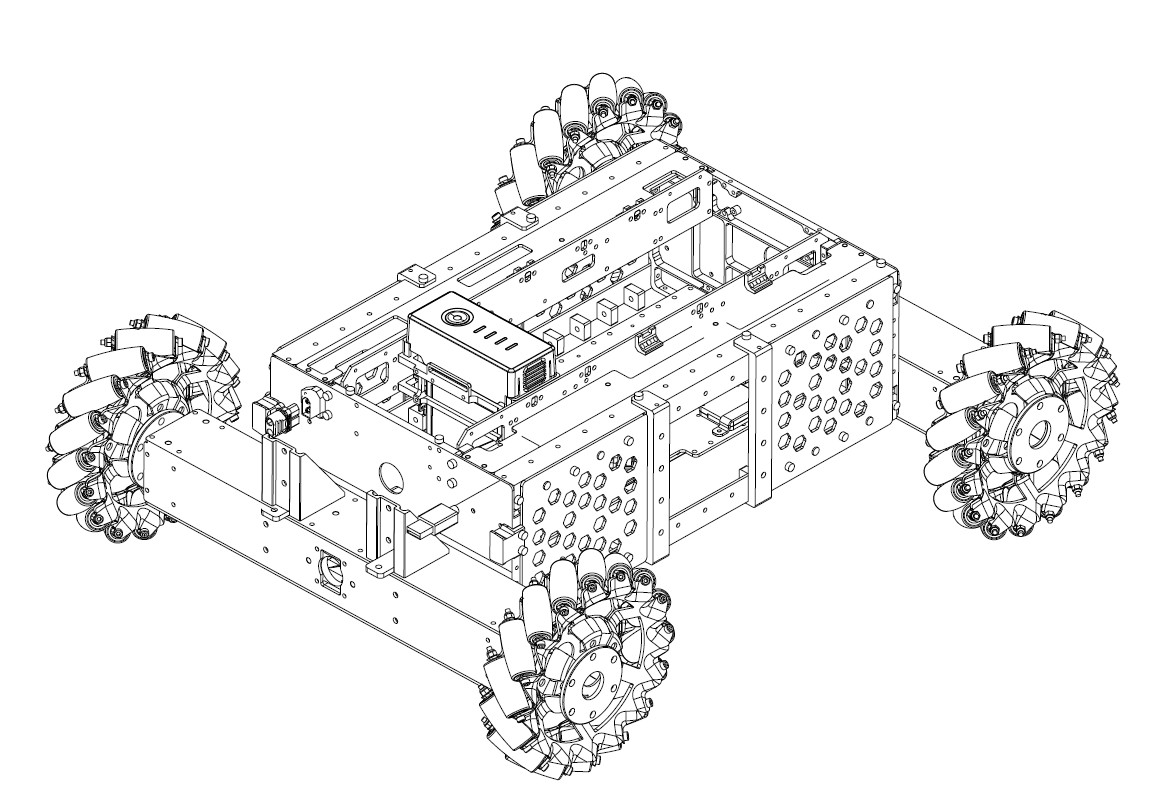
整个平台主要由三个部分组成
- 底盘模块
-
使用麦克纳姆轮,支持全向运动
-
动力系统由RoboMaster M3508 P19 无刷直流减速电机 和RoboMaster C620 电子调速器组成
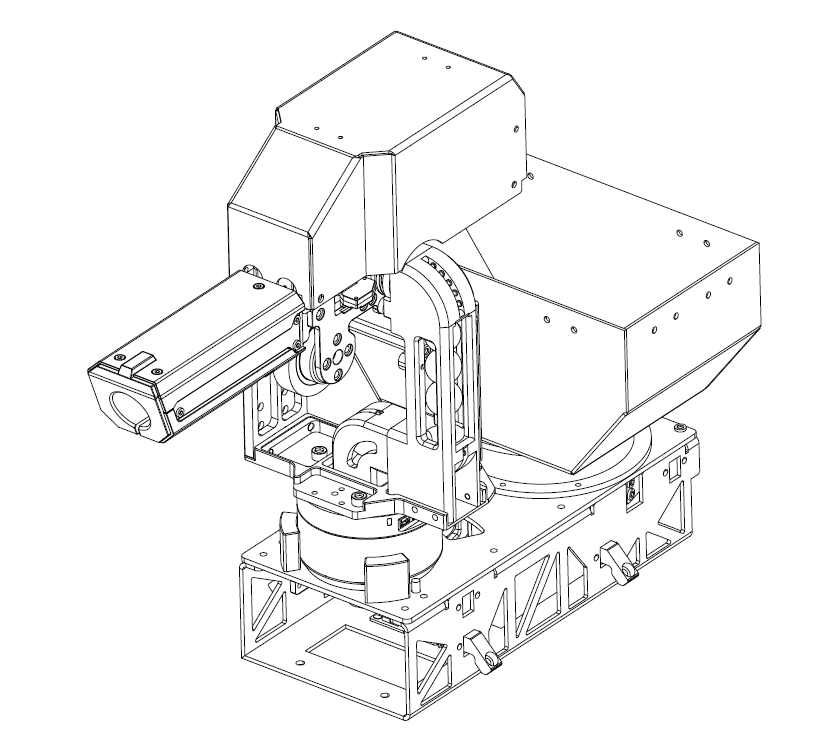
- 云台模块
-
采用两轴云台支持2自由度的旋转运动
-
提供17mm TPU弹丸的拨弹与发射机构
-
云台动力系统由RoboMaster GM6020 无刷电机 (包含电调) 组成
-
拨弹动力系统由M2006 P36 无刷直流减速电机 组成
-
发射动力系统由 DJI Snail 2305 竞速电机 组成
-
使用RoboMaster Development Board Type A (STM32F427) 作为主控板
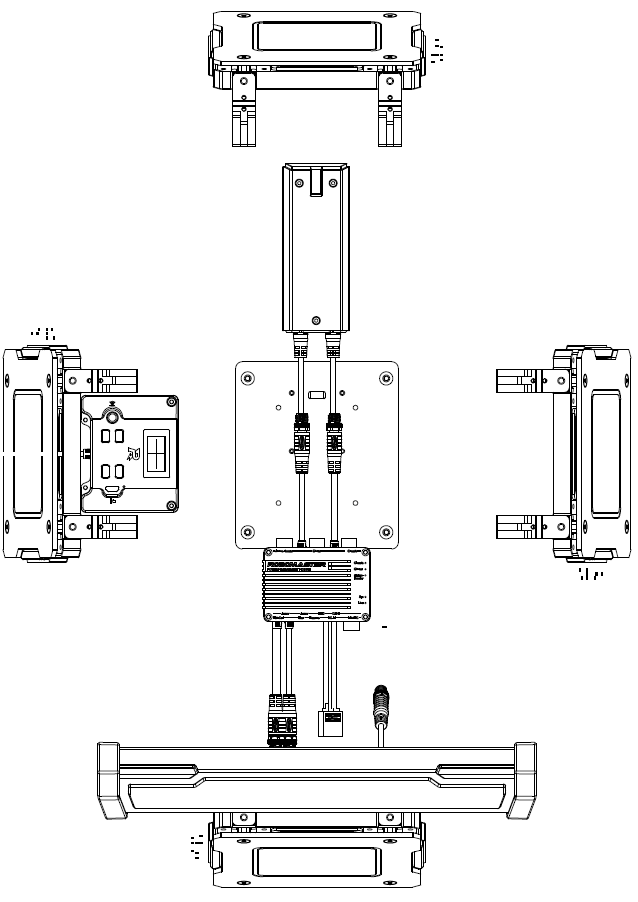
- 裁判系统模块
-
裁判系统是集成计算、通信、控制于一体的针对机器人比赛的电子判罚系统。开发者可以通过裁判系统,从特定的软件接口获取比赛进程和机器人状态的信息
-
裁判系统整体包含安装于机器人上的机载端以及安装在 PC 物理机上的服务器和客户端软件两部分。
-
机载端包含主控模块、电源管理模块、装甲模块、测速模块、场地交互模块等。
-
关于裁判系统模块更多信息请参考相关资料中的《裁判系统规范手册》。
除此之外,整个平台还包括DT7遥控器和智能锂电池 (经纬 M100 TB47D电池 或 TB48D) 及其充电器。关于机器人平台更多详细信息,请参考相关文档中的《AI机器人用户手册》。
整个平台可以容纳多种类型的传感器和计算设备,满足研究者定制化扩展开发的需求。整个平台提供了传感器安装架接口,适配多种类型的传感器包括单目相机、激光雷达、UWB定位套件、深度相机等。平台官方支持DJI Manifold 2作为机载端的计算设备,同时还兼容intel NUC和搭载相应尺寸扩展板的Nvidia Jetson TX1, TX2 或 Xavier设备。
| 结构 | |
|---|---|
| 整机尺寸 | 600 x 450 x 460 mm |
| 重量(含电池) | 16.6 kg |
| 性能 | |
| 最大前进速度 | 3 m/s |
| 最大平移速度 | 2 m/s |
| 云台 Pitch轴 转动角度 | -20° ~ 20° |
| 云台 Yaw轴 转动角度 | -90° ~ 90° |
| 弹丸最大发射频率 | 10 发/秒 |
| 弹丸最大发射速度 | 25 m/s |
| Remote Controller | 200 发 |
| 电池 | |
| 型号 | DJI TB47D / DJI TB48D |
| 类型 | LiPo 6s |
| 电压 | 22.8v |
| 电池容量 | 4500 mAH / 5700 mAH |
| 遥控器 | |
| 型号 | DJI DT7 |
| Firmware upgrade | 2.4 GHz |
| 充电接口 | Micro USB |
| 通信接口 | |
| 接口类型 | Micro USB |
| 通信方式 | STM32虚拟串口 |
| 波特率 | 921600 |